少子高齢化による労働人口の減少により、様々な生産現場で人手不足が深刻化しています。
NSTでは産業用ロボットを活用した「自動搬送」「無人化・省人化設備」のご提案を行っております。
設備の完全自動化はもちろん、作業内容や生産数、お客様のご予算に合わせて設備の一部を自動化する「半自動化」のご要望にも柔軟にご対応致します。

![]()
6軸多関節ロボットに、視覚センサー・荷重センサー・距離センサー等のセンシング機器を組み合わせ、搬送やパレタイズだけでなく、自動組付・自動検査までを行うロボットシステムを提案しロボットの可能性を広げます。
ファナック・安川エンジニアリング等のロボットメーカーオプションのセンサー類以外のセンサーでも、PC・PLCと組み合わせオリジナルソフトを製作し、様々なアプリケーションに対応します。
- 人手不足を解消したい
- 人件費を削減したい
- 生産性を上げたい
- 人手作業を自動化して品質を安定させたい
- 危険な作業を自動化したい
- 単純作業を自動化したい
- 自動化はしたいが、どうしたらいいかわからない
このようなお悩みをお持ちでしたら、ぜひエヌエスティーにご相談ください。
貴社の事業内容、規模、体制に応じて柔軟な発想とアイデアで問題解決いたします。
![]()
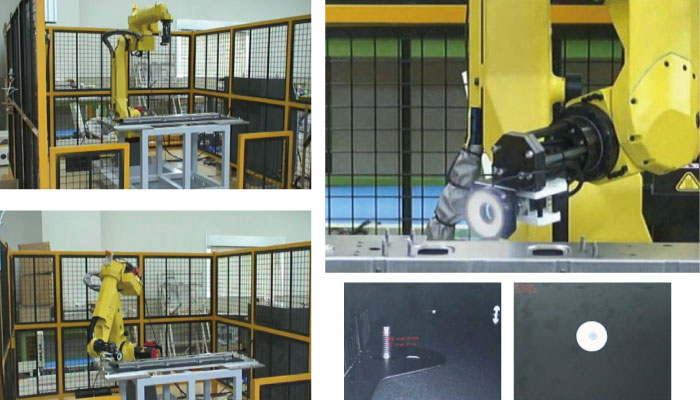
スタッドボルト径計測・高さ計測/穴径計測
ロボットの先端にカメラを設置し、位置決めされたワークの指定箇所を撮像し、画像処理にて高さ・径を計測及び判定を行います。ロボットにカメラを設置することで、カメラ1台で複数箇所の検査及び他機種対応が可能となります。
![]()
材料自動研磨
素材鋼の硬度測定ポイントを精度よく研磨するため、ロボットに砥石とロードセルを設置し、研磨時の砥石押し付け力を計測し、その値が常に一定になるようロボットの押し付け力を自動で制御します。

![]()
自動クラッチ組付け
2台のロボットを使用し、ツールチェンジを行いながら内蔵部品の組付けを行います。アウタープレート・インナープレートは歯の位相をカメラで確認し、歯の位置を合わせ組付けを行います。

![]()
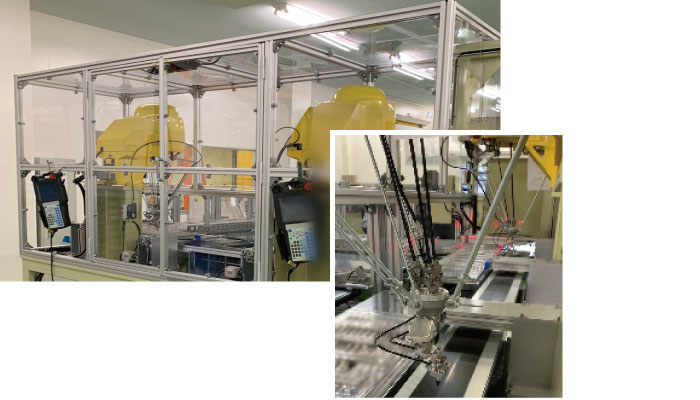
電子部品取出し自動機
コンベア上にランダムな姿勢で流れてくる電子部品をカメラで位置・姿勢を検出し、ゲンコツロボットにてピッキング後パレットへパレタイズを行います。
コンベアスピードが速いため、2台のゲンコツロボットを使用し交互に作業を行うことでスピードに追従します。